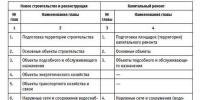
Условия равновесия твердого тела. Равновесие тел
ОПРЕДЕЛЕНИЕ
Устойчивое равновесие - это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, возвращается в прежнее положение.
Это происходит, если при небольшом смещении тела в любом направлении от первоначального положения равнодействующая сил, действующих на тело, становится отличной от нуля и направлена к положению равновесия. Например, шарик, лежащий на дне сферического углубления (рис.1 а).
ОПРЕДЕЛЕНИЕ
Неустойчивое равновесие - это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, будет еще больше отклоняться от положения равновесия.
В данном случае при небольшом смещении тела из положения равновесия равнодействующая приложенных к нему сил отлична от нуля и направлена от положения равновесия. Примером может служить шарик, находящийся в верхней точке выпуклой сферической поверхности (ри.1 б).
ОПРЕДЕЛЕНИЕ
Безразличное равновесие - это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, не меняет своего положения (состояния).
В этом случае при небольших смещениях тела из первоначального положения равнодействующая приложенных к телу сил остается равной нулю. Например, шарик, лежащий на плоской поверхности (рис.1,в).
Рис.1. Различные типы равновесия тела на опоре: а) устойчивое равновесие; б) неустойчивое равновесие; в) безразличное равновесие.
Статическое и динамическое равновесие тел
Если в результате действия сил тело не получает ускорения, оно может находиться в состоянии покоя или двигаться равномерно прямолинейно. Поэтому можно говорить о статическом и динамическом равновесии.
ОПРЕДЕЛЕНИЕ
Статическое равновесие - это такое равновесие, когда под действием приложенных сил тело находится в состоянии покоя.
Динамическое равновесие - это такое равновесие, когда по действием сил тело не изменяет своего движения.
В состоянии статического равновесия находится подвешенный на тросах фонарь, любое строительное сооружение. В качестве примера динамического равновесия можно рассматривать колесо, которое катится по плоской поверхности при отсутствии сил трения.
Определение
Равновесием тела называют такое состояние, когда любое ускорение тела равняется нулю, то есть все действия на тело сил и моментов сил уравновешены. При этом тело может:
- находиться в состоянии спокойствия;
- двигаться равномерно и прямолинейно;
- равномерно вращаться вокруг оси, которая проходит через центр его тяжести.
Условия равновесия тела
Если тело находится в равновесии, то одновременно выполняются два условия.
- Векторная сумма всех сил, действующих на тело, равна нулевому вектору : $\sum_n{{\overrightarrow{F}}_n}=\overrightarrow{0}$
- Алгебраическая сумма всех моментов сил, действующих на тело, равна нулю: $\sum_n{M_n}=0$
Два условия равновесия являются необходимыми, но не являются достаточными. Приведем пример. Рассмотрим равномерно катящееся без проскальзывания колесо по горизонтальной поверхности. Оба условия равновесия выполняются, однако тело движется.
Рассмотрим случай, когда тело не вращается. Для того, чтобы тело не вращалось и находилось в равновесии, необходимо, чтобы сумма проекций всех сил на произвольную ось равнялась нулю, то есть равнодействующая сил. Тогда тело или находится в спокойствии, или двигается равномерно и прямолинейно.
Тело, которое имеет ось вращения, будет находиться в равновесном состоянии, если выполняется правило моментов сил: сумма моментов сил, которые вращают тело по часовой стрелке, должна равняться сумме моментов сил, которые вращают его против часовой стрелки.
Чтобы получить нужный момент при наименьшем усилии, нужно прикладывать силу как можно дальше от оси вращения, увеличивая тем же плечо силы и соответственно уменьшая значение силы. Примеры тел, которые имеют ось вращения, : рычаг, двери, блоки, коловорот и тому подобное.
Три вида равновесия тел, которые имеют точку опоры
- стойкое равновесие, если тело, будучи выведенным из положения равновесия в соседнее ближайшее положение и оставлено в спокойствии, вернется в это положение;
- неустойчивое равновесие, если тело, будучи выведенным из положения равновесия в соседнее положение и оставлено в спокойствии, будет еще больше отклоняться от этого положения;
- безразличное равновесие - если тело, будучи выведенным в соседнее положение и оставлено в спокойствии, останется в новом своем положении.
Равновесие тела с закрепленной осью вращения
- стойким, если в положении равновесия центр тяжести С занимает самое низкое положение из всех возможных ближних положений, а его потенциальная энергия будет иметь наименьшее значение из всех возможных значений в соседних положениях;
- неустойчивым, если центр тяжести С занимает наивысший из всех ближних положений, а потенциальная энергия имеет наибольшее значение;
- безразличным, если центр тяжести тела С во всех ближних возможных положениях находится на одном уровне, а потенциальная энергия при переходе тела, не изменяется.
Задача 1
Тело A массой m = 8 кг поставлено на шероховатую горизонтальную поверхность стола. К телу привязана нить, перекинутая через блок B (рисунок 1, а). Какой груз F можно подвязать к концу нити, свешивающейся с блока, чтобы не нарушить равновесия тела A? Коэффициент трения f = 0,4; трением на блоке пренебречь.
Определим вес тела ~A: ~G = mg = 8$\cdot $9,81 = 78,5 Н.
Считаем, что все силы приложены к телу A. Когда тело поставлено на горизонтальную поверхность, то на него действуют только две силы: вес G и противоположно направленная реакция опоры RA (рис. 1, б).
Если же приложить некоторую силу F, действующую вдоль горизонтальной поверхности, то реакция RA, уравновешивающая силы G и F, начнет отклоняться от вертикали, но тело A будет находиться в равновесии до тех пор, пока модуль силы F не превысит максимального значения силы трения Rf max, соответствующей предельному значению угла ${\mathbf \varphi }$o(рис. 1, в).
Разложив реакцию RA на две составляющие Rf max и Rn, получаем систему четырех сил, приложенных к одной точке (рис. 1, г). Спроецировав эту систему сил на оси x и y, получим два уравнения равновесия:
${\mathbf \Sigma }Fkx = 0, F - Rf max = 0$;
${\mathbf \Sigma }Fky = 0, Rn - G = 0$.
Решаем полученную систему уравнений: F = Rf max, но Rf max = f$\cdot $ Rn, а Rn = G, поэтому F = f$\cdot $ G = 0,4$\cdot $ 78,5 = 31,4 Н; m = F/g = 31,4/9,81 = 3,2 кг.
Ответ: Масса груза т = 3,2 кг
Задача 2
Система тел, изображённая на рис.2, находится в состоянии равновесия. Масса груза тг=6 кг. Угол между векторами $\widehat{{\overrightarrow{F}}_1{\overrightarrow{F}}_2}=60{}^\circ $. $\left|{\overrightarrow{F}}_1\right|=\left|{\overrightarrow{F}}_2\right|=F$. Найти массу гирь.

Равнодействующая сил ${\overrightarrow{F}}_1и\ {\overrightarrow{F}}_2$ равна по модулю весу груза и противоположна ему по направлению: $\overrightarrow{R}={\overrightarrow{F}}_1+{\overrightarrow{F}}_2=\ -m\overrightarrow{g}$. По теореме косинусов, ${\left|\overrightarrow{R}\right|}^2={\left|{\overrightarrow{F}}_1\right|}^2+{\left|{\overrightarrow{F}}_2\right|}^2+2\left|{\overrightarrow{F}}_1\right|\left|{\overrightarrow{F}}_2\right|{cos \widehat{{\overrightarrow{F}}_1{\overrightarrow{F}}_2}\ }$.
Отсюда ${\left(mg\right)}^2=$; $F=\frac{mg}{\sqrt{2\left(1+{cos 60{}^\circ \ }\right)}}$;
Поскольку блоки подвижные, то $m_г=\frac{2F}{g}=\frac{2m}{\sqrt{2\left(1+\frac{1}{2}\right)}}=\frac{2\cdot 6}{\sqrt{3}}=6,93\ кг\ $
Ответ: масса каждой из гирь равна 6,93 кг


РАВНОВЕСИЕ ТЕЛ
«Дайте мне точку опоры, и я подниму Землю.»
Архимед

Условия равновесия.
- I условие равновесия:
- Тело находится в равновесии, если геометрическая сумма внешних сил, приложенных к телу, равна нулю.
∑ F=0.
- II условие равновесия:
- Сумма моментов сил, действующих по часовой стрелке, должна равняться сумме моментов сил, действующих против часовой стрелки.
∑ M по час. =∑ M против час.
- М = F l, где М – момент силы, F - сила, l – плечо силы – кратчайшее расстояние от точки опоры до линии действия силы.

Центр тяжести тела.
- Центр тяжести тела- это точка, через которую проходит равнодействующая всех параллельных сил тяжести, действующих на отдельные элементы тела.
- Найти центр тяжести данных фигур.
- Найти центр тяжести данных фигур.
- Найти центр тяжести данных фигур.
- Найти центр тяжести данных фигур.

ВИДЫ РАВНОВЕСИЯ
Безразличное
Устойчивое
Неустойчивое

Если на тело, имеющее опору, действуют уравновешивающие силы, то тело находится в положении равновесия.

При отклонении тела от положения равновесия нарушается и равновесие сил. Если тело под действием равнодействующей силы возвращается в исходное положение, то это - устойчивое равновесие .
Если же тело под действием равнодействующей силы, ещё сильнее отклоняется от положения равновесия, то это - неустойчивое равновесие .

Возможен случай, когда при любом положении тела, равновесие сил сохраняется. Это состояние называется безразличным равновесием .

Вывод :
- Равновесие устойчиво, если при малом отклонении от положения равновесия есть сила, стремящаяся вернуть его в это положение.
- Устойчиво такое положение, в котором его потенциальная энергия минимальна.



В случае если центр тяжести расположен ниже точки опоры, равновесие тела или системы тел – устойчивое . При отклонении тела, центр тяжести повышается, и тело возвращается в исходное состояние.

Равновесие тела, имеющего точку опоры ниже центра тяжести, неустойчиво . Но равновесие может восстанавливаться путём смещения точки опоры тела в сторону смещения центра тяжести.


По положению центра тяжести можно судить о виде равновесия. Например езда эквилибриста по канату на велосипеде с противовесом является примером устойчивого равновесия .

Вывод :
- Для устойчивости тела, находящегося на одной точке или линии опоры необходимо, чтобы центр тяжести находился ниже точки (линии) опоры.



Если при отклонении тела, имеющего площадь опоры, происходит повышение центра тяжести, то равновесие будет устойчивым. При устойчивом равновесии вертикальная прямая, проходящая через центр тяжести, всегда будет проходить через площадь опоры.

Два тела, у которых одинаковы вес и площадь опоры, но разная высота, имеют разный предельный угол наклона. Если этот угол превысить, то тела опрокидываются.

При более низком положении центра тяжести необходимо затратить большую работу для опрокидывания тела. Следовательно работа по опрокидыванию может служить мерой его устойчивости.

Неустойчивое равновесие
Устойчивое равновесие



Вывод :
1. Устойчиво то тело, у которого площадь опоры больше.
2. Из двух тел одинаковой площади устойчиво то, у которого центр тяжести расположен ниже, т.к. его можно отклонить без опрокидывания на большой угол.




- Существует три вида равновесия: устойчивое, неустойчивое, безразличное.
- Устойчиво положение тела, в котором его потенциальная энергия минимальна.
- Устойчивость тел на плоской поверхности тем больше, чем больше площадь опоры и ниже центр тяжести.
Если тело неподвижно, то это тело находится в равновесии. Многие тела покоятся, несмотря на то, что на них действуют силы со стороны других тел. Это различные строения, камни, машины, части механизмов, мосты и многие другие тела. Задача изучения условий равновесия тел имеет большое практическое значение для машиностроения, строительного дела, приборостроения и других областей техники.
Все реальные тела под воздействием приложенных к ним сил со стороны других тел изменяют свою форму и размеры, то есть деформируются. Величина деформации зависит от многих факторов: материала тела, его формы, приложенных к нему сил. Деформации могут быть настолько малыми, что обнаружить их можно только при помощи специальных приборов.
Деформации могут быть большими, и тогда их легко заметить, например, растяжение пружины или резинового шнура, изгиб деревянной доски или тонкой металлической линейки.
Иногда действия сил вызывают значительные деформации тела, в этом случае, фактически после приложения сил, мы будем иметь дело с телом, которое имеет совершенно новые геометрические размеры и форму. Также необходимо будет определить условия равновесия этого нового деформированного тела. Подобные задачи, связанные с расчетом деформаций тел, как правило, очень сложны.
Довольно часто в реальных жизненных ситуациях деформации очень невелики, а тело при этом остается в равновесии. В таких случаях деформациями можно пренебречь и рассматривать ситуацию так, как если бы тела были недеформируемыми, т. е. абсолютно твердыми. Абсолютно твердое тело в механике - это такая модель реального тела, у которой расстояние между частицами не изменяется, каким бы воздействиям данное тело не подвергалось. Следует понимать, что абсолютно твердых тел в природе не существует, но в некоторых случаях мы можем считать реальное тело абсолютно твердым.
Например, железобетонную плиту перекрытия дома можно считать абсолютно твердым телом в том случае, когда на ней стоит очень тяжелый шкаф. Сила тяжести шкафа действует на плиту, и плита прогибается, но эта деформация будет столь мала, что обнаружить ее можно только с помощью точных приборов. Поэтому в данной ситуации мы можем пренебречь деформацией и считать плиту абсолютно твердым телом.
Выяснив условия равновесия абсолютно твердого тела, мы узнаем условия равновесия реальных тел в тех ситуациях, когда их деформациями можно пренебречь.
Статика - раздел механики, в котором изучаются условия равновесия абсолютно твердых тел.
В статике учитываются размеры и форма тел, а все рассматриваемые тела считаются абсолютно твердыми. Статику можно рассматривать как частный случай динамики, так как неподвижность тел, когда на них действуют силы, есть частный случай движения с нулевой скоростью.
Деформации, происходящие в теле, изучаются в прикладных разделах механики (теория упругости, сопротивление материалов). В дальнейшем для краткости абсолютно твердое тело будем называть твердым телом, или просто телом.
Выясним условия равновесия любого тела. Для этого используем законы Ньютона. Чтобы упростить себе задачу, разобьем мысленно все тело на большое число небольших частей, каждый из которых можно рассматривать как материальную точку. Все тело состоит из множества элементов, некоторые из них изображены на рисунке. Силы, которые действуют на данное тело со стороны других тел - это внешние силы. Внутренние силы - это силы, с которыми элементы действуют друг на друга. Сила F1,2 - это сила, действующая на элемент 1 со стороны элемента 2. Сила F2,1 приложена к элементу 2 элементом 1. Это внутренние силы; к ним относятся также силы F1,3 и F3,1, F2,3 и F3,2.
Силы F1, F2, F3 - это геометрическая сумма всех внешних сил, действующих на элементы 1, 2, 3. Силы F1 штрих, F2 штрих, F3 штрих - это геометрическая сумма внутренних сил, приложенных к элементам 1, 2, 3.
Ускорение каждого элемента тела равно нулю, потому что тело покоится. Значит, по второму закону Ньютона равна нулю и геометрическая сумма всех внутренних и внешних сил, действующих на элемент.
Для равновесия тела необходимо и достаточно, чтобы геометрическая сумма всех внешних и внутренних сил, действующих на каждый элемент этого тела, была равна нулю.
Каким условиям должны удовлетворять внешние силы, действующие на твердое тело, чтобы оно находилось в покое? Для этого сложим уравнения. Равенство получается ноль.
В первых скобках этого равенства записана векторная сумма всех внешних сил, действующих на тело, а во вторых скобках - векторная сумма всех внутренних сил, приложенных к элементам этого тела. Мы уже выяснили, используя третий закон Ньютона, что векторная сумма всех внутренних сил системы равна нулю, потому что любой внутренней силе соответствует сила равная ей по модулю и противоположная по направлению.
Следовательно, в полученном равенстве остается исключительно геометрическая сумма внешних сил, которые оказывают действие на тело.
Это равенство является обязательным условием для равновесия материальной точки. Если мы применяем его к твердому телу, то это равенство называют первым условием его равновесия.
В том случае, если твердое тело находится в равновесии, то геометрическая сумма внешних сил, приложенных к нему, равна нулю.
Учитывая тот факт, что к одним элементам тела может быть приложено сразу несколько внешних сил, а на другие элементы внешние силы могут вообще не действовать, то число всех внешних сил совершенно необязательно должно быть равно числу всех элементов.
Если сумма внешних сил равна нулю, то равна нулю и сумма проекций этих сил на оси координат. В частности для проекций внешних сил на ось ОХ можно записать, что сумма проекций на ось ОХ внешних сил равна нулю. Аналогичным способом может быть записано уравнение для проекций сил на оси ОY и OZ.
На основе условия равновесия любого элемента тела выведено первое условие равновесия твердого тела.
Тело находится в состоянии покоя (или движется равномерно и прямолинейно), если векторная сумма всех сил, действующих на него, равна нулю. Говорят, что силы уравновешивают друг друга. Когда мы имеем дело с телом определенной геометрической формы, при вычислении равнодействующей силы можно все силы прикладывать к центру масс тела.
Условие равновесия тел
Чтобы тело, которое не вращается, находилось в равновесии, необходимо, чтобы равнодействующая всех сил, действующий на него, была равна нулю.
F → = F 1 → + F 2 → + . . + F n → = 0 .
На рисунке выше изображено равновесие твердого тела. Брусок находится в состоянии равновесия под действием трех действующих не него сил. Линии действия сил F 1 → и F 2 → пересекаются в точке O . Точка приложения силы тяжести - центр масс тела C . Данные точки лежат на одной прямой, и при вычислении равнодействующей силы F 1 → , F 2 → и m g → приводятся к точке C .
Условия равенства нулю равнодействующей всех сил недостаточно, если тело может вращаться вокруг некоторой оси.
Плечом силы d называется длина перпендикуляра, проведенного от линии действия силы к точке ее приложения. Момент силы M - произведение плеча силы на ее модуль.
Момент силы стремится повернуть тело вокруг оси. Те моменты, которые поворачивают тело против часовой стрелки, считаются положительными. Единица измерения момента силы в международной системе CИ - 1 Н ь ю т о н м е т р.
Определение. Правило моментов
Если алгебраическая сумма всех моментов, приложенных к телу относительно неподвижной оси вращения, равна нулю, то тело находится в состоянии равновесия.
M 1 + M 2 + . . + M n = 0

Важно!
В общем случае для равновесия тел необходимо выполнение двух условий: равенство нулю равнодействующей силы и соблюдение правила моментов.
В механике есть разные виды равновесия. Так, различают устойчивое и неустойчивое, а также безразличное равновесие.

Типичный пример безразличного равновесия - катящееся колесо (или шар), которое, если остановить его в любой точке, окажется в состоянии равновесия.
Устойчивое равновесие - такое равновесие тела, когда при его малых отклонениях возникают силы или моменты сил, которые стремятся вернуть тело в равновесное состояние.
Неустойчивое равновесие - состояние равновесия, при малом отклонении от которого силы и моменты сил стремятся вывести тело из равновесия еще больше.

На рисунке выше положение шара (1) - безразличное равновесие, (2) - неустойчивое равновесие, (3) - устойчивое равновесие.
Тело с неподвижной осью вращения может находится в любом из описанных положений равновесия. Если ось вращения проходит через центр масс, возникает безразличное равновесие. При устойчивом и неустойчивом равновесии центр масс располагается на вертикальной прямой, которая проходит через ось вращения. Когда центр масс находится ниже оси вращения, равновесие является устойчивым. Иначе - наоборот.

Особый случай равновесия - равновесие тела на опоре. При этом упругая сила распределяется по всему основанию тела, а не проходит через одну точку. Тело покоится в равновесии, когда вертикальная линия, проведенная через центр масс, пересекает площадь опоры. Иначе, если линия из центра масс не попадает в контур, образованный линиями, соединяющими точки опоры, тело опрокидывается.
Пример равновесия тела на опоре - знаменитая Пизанская башня. По легенде с нее сбрасывал шары Галилео Галилей, когда проводил свои опыты по изучению свободного падения тел.

Линия, проведенная из центра масс башни пересекает основание приблизительно в 2,3 м от его центра.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter